April 12, 2010 – Houston – Increasing its cadre of laser mapping researchers, the University of Houston will expand its pioneering work in such areas as homeland security, disaster recovery, oil and gas exploration, wind farm site planning and environmental studies.
The NSF National Center for Airborne Laser Mapping (NCALM) and the groundbreaking researcher leading it recently moved operations to the University of Houston. Based upon historical information, revenues generated by the center’s operation are anticipated to be $1 million per year and will be reinvested in the program.
 NCALM is UH’s first and only NSF-supported center, established and sustained by funding from the National Science Foundation. This differs from the way the university typically sets up centers, using university funds or grants from multiple sources for multiple projects. These types of centers support NSF’s focus on interdisciplinary research, spanning several institutions and departments.
NCALM is UH’s first and only NSF-supported center, established and sustained by funding from the National Science Foundation. This differs from the way the university typically sets up centers, using university funds or grants from multiple sources for multiple projects. These types of centers support NSF’s focus on interdisciplinary research, spanning several institutions and departments.
Ramesh Shrestha, Hugh Roy and Lillie Cranz Cullen Distinguished Professor of Civil and Environmental Engineering, brought NCALM to UH from the University of Florida. He has been director of the center, focused on ground-based scanning laser technology and airborne laser swath mapping research, since it was established in 2003. Shrestha brought much of his Florida team with him to Houston, where they now operate NCALM jointly with the University of California-Berkley.
“With the center, we have brought laser mapping’s uses to the forefront and expect to continue to have this impact in our new Houston home,” Shrestha said. “We plan to establish curriculum catered to this specialty and eventually add a graduate degree in geosensing systems engineering. This is in addition to carrying out research far surpassing what is capable in laser mapping to date.”
Shrestha’s work with laser mapping goes back to the 1990s, when this once niche research area was just making its debut. Bill Carter, now a research professor at UH, worked with him early on and helped establish NCALM.
“Together, we saw its potential to far exceed what was possible with many traditional methods, such as airborne photogrammetric mapping that uses cameras to detail terrain,” Carter said. “Laser mapping has the ability to work day or night, as well as generally map areas even though they were covered by forests and other vegetation where photogrammetric methods couldn’t.”
It wasn’t long before other scientists would see its same benefits, especially as the two developed techniques to remove and minimize some of the errors seen in the early years. Their equipment became fine-tuned to collect even more data, now mapping as many as 167,000 points per second compared to the 3,000 they were able to achieve when they first started.
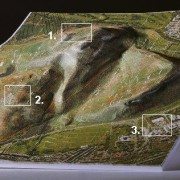
Their work has changed the way the state of Florida monitors erosion on its coastline, produced the highest resolution 3-D images in existence of the San Andreas Fault and taken them across the globe to map Mayan Ruins in Belize and volcanoes in Hawaii. While the impact of their work is already far reaching, their plan for the coming years indicates they are not close to completion. The value of this work is evident in evaluating the before and after of hurricanes and earthquakes in terms of improving building design and other mitigation efforts, as well as offering predictive tools for subsequent powerful events.
 Aided by NSF, future NCALM efforts explore the possibility of using Light Detection and Ranging (LiDAR) to map everything from glacial movements to the migration of penguin colonies in Antarctica. Using LiDAR, researchers take measurements of the ground’s surface from their Cessna 337 Skymaster airplane.
Aided by NSF, future NCALM efforts explore the possibility of using Light Detection and Ranging (LiDAR) to map everything from glacial movements to the migration of penguin colonies in Antarctica. Using LiDAR, researchers take measurements of the ground’s surface from their Cessna 337 Skymaster airplane.
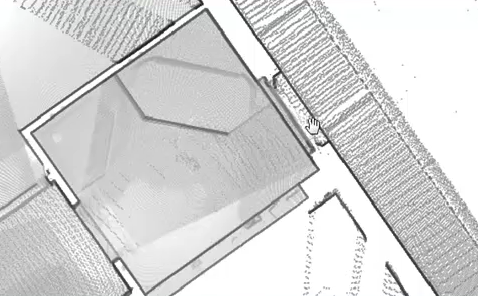
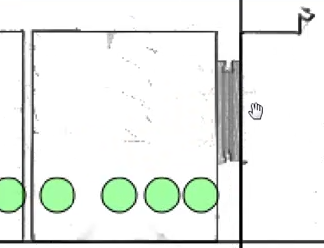
From roughly 2,000 feet, this remote technology measures properties of scattered light through the use of laser pulses. Thousands of small cone-shaped pulses travel through a hole in the bottom of the plane to the ground below, and a unique detector picks up rays reflected from the ground. Then, each point’s distance is determined by measuring the time delay between the transmission of a pulse and the detection of reflected signals. The plane’s location and movement in the air are tracked by an inertial measurement unit fixed inside the laser system with a GPS receiver mounted to the plane and others on the ground. Both are used, along with the laser data, to produce detailed 3-D topographical images of the terrain.
“In coming years, our group plans to develop a next-generation LiDAR system. The unit would be less expensive than commercially available systems and allow for some of the most accurate, highest-resolution observations possible in laser mapping,” Shretha said. “We want to develop a system like no one else has developed. It would really change what could be done with this technology. It would have new features, be faster, smaller and capture more during each flight than we can today.”
According to Shrestha, this system would use a much shorter pulse-length laser, increasing the number of points that could be mapped per second to 800,000. This would add to data accuracy and reduce the amount of time needed in the air to collect the information. Additionally, it would be able, for the first time, to penetrate shallow water depths.
###
NOTE TO JOURNALISTS: High-resolution photos of Ramesh Shretha and the Cessna 337 Skymaster airplane are available to media by contacting Lisa Merkl.
About the University of Houston
The University of Houston, Texas’ premier metropolitan research and teaching institution, is home to more than 40 research centers and institutes and sponsors more than 300 partnerships with corporate, civic and governmental entities. UH, the most diverse research university in the country, stands at the forefront of education, research and service with more than 37,000 students.
About the Cullen College of Engineering
The Cullen College of Engineering at UH has played a vitally important role in educating engineers in Texas. Taught by innovative faculty, eight of whom are in the National Academy of Engineering, the college offers degree programs in biomedical, chemical, civil, computer, electrical, environmental, industrial, mechanical and petroleum engineering, as well as specialty programs in materials, aerospace, and computer and systems engineering.
For more information about UH, visit the university’s Newsroom at http://www.uh.edu/news-events/.
To receive UH science news via e-mail, visit http://www.uh.edu/news-events/mailing-lists/sciencelistserv.php.
For additional news alerts about UH, follow us on Facebook and Twitter.









 LAKE MARY, Fla., Oct. 5 /PRNewswire/ — FARO Technologies, Inc. (Nasdaq:
LAKE MARY, Fla., Oct. 5 /PRNewswire/ — FARO Technologies, Inc. (Nasdaq: